In this
article:
Navigation:
HomeHardware
Software
Techniques
Controllers
Reviews
Index
Introduction
In early 1998 the Robotics Club was looking for a platform that we could standardize on for various activities and learning. The challenge was that it had to be affordable for a wide range of members (from grade school students, to engineers, to seniors living on a fixed income.) Someone who had already taken a shot at this was Ray Butts.
Ray built these platforms out of straight cut ABS plastic. Today you could print them on a 3D printer. There were three “layers”, a battery layer, a motor layer, and the top/sensor layer. They were held together with #10–24 bolts and nuts. A small ball caster made out of a ping pong ball with a hole poked in it formed the third point of stabilty.
The Platform
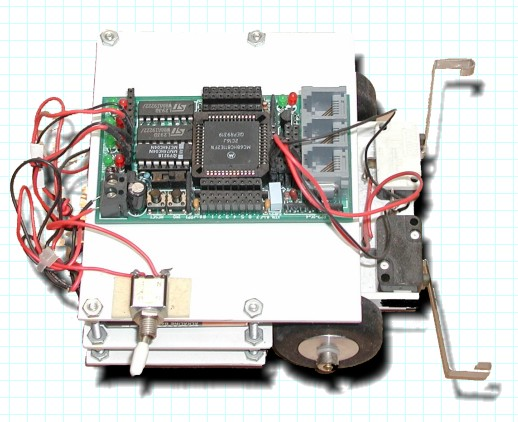
The image above is the ARBE-ONE that I built up as part of the investigation into using it as a platform with the club. It is being driven by a Miniboard which used L293D H-bridge chips. These were well matched to the simple DC motors Ray had provided. You can’t see the 6 AA batteries that are in the flat space below the Miniboard. But they provided power. Two leaf switches glued to the sensor platform formed the simplest of sensor networks (left and right bumpers) and an on/off switch attached with double sided tape.
This was a good shot at a platform, we eventually went with the Boe Bot from Parallax as the standard robot base but even though it didn’t get picked I have a lot of respect for the design simplicity of the ARBE-ONE.